 Схема прямого управления
Схема прямого управления
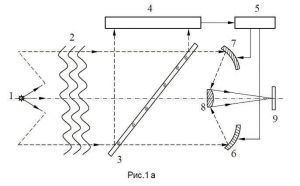
Звезда 1 отражает свет, который, проходя через атмосферу 2, искажает волновой фронт. Отраженный светоделителем 3 свет попадает на датчик 4, где регистрируется деформация приходящего от объекта волнового фронта. Информация об этом поступает в управляющее устройство 5, где вырабатываются требуемые величины подвижек управляемых зеркал 6 и 7. Свет отражается зеркалами 6, 7 и 8 образуя изображение звезды в плоскости 9. Данная система является системой прямого управления, в ней отсутствует контур обратной связи. Системы прямого управления обладают высоким быстродействием, определяемым постоянной времени корректора и временем, выработки управляющих сигналов. Однако у данной системы есть некоторые недостатки. Искажения волнового фронта, возникающие после светоделителя 3, а именно системой формирования изображения, данная система устранить не может. Также вследствие того, что после прохождения корректирующих зеркал волновой фронт не контролируется, то приводы зеркал должны обеспечить высокую точность воспроизведения управляющих сигналов. Данные недостатки существенны для систем адаптивной оптики, а поэтому схема прямого управления не нашла широкого применения.
 Cхема с обратной связью
Cхема с обратной связью
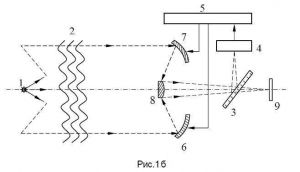
В этой системе светоделитель 3 и датчик искажений волнового фронта 4 расположены после системы формирования изображения. Всякое искажение волнового фронта, независимо от вызывающей его причины (атмосферная турбуленция, деформации зеркал, погрешности коррекции искажений, определяемые погрешностью работы привода и т.п.) фиксируется датчиком 4 и вызывает появление управляющих сигналов а, следовательно, и соответствующую коррекцию искажений волнового фронта. Однако данные системы также имеют свои недостатки. Быстродействие данных систем заметно меньше, чем у систем прямого управления, а постоянные времени управляющего устройства должны выбираться так, чтобы обеспечить устойчивость работы контура обратной связи. Однако, достоинства систем с замкнутым контуром управления настолько существенны, что такие устройства получили наибольшее распространение.
Для решения задачи максимизации интенсивности излучения на объекте, в системе адаптивной оптики, схема которой показана на рис 1б, датчик волнового фронта можно заменить устройством, регистрирующим лишь уровень интенсивности на объекте. Зеркалам 6 и 7 сообщают пробные движения и по изменениям интенсивности вырабатывают сигналы управления движением корректора.
 Система формирования лазерного пучка
Система формирования лазерного пучка
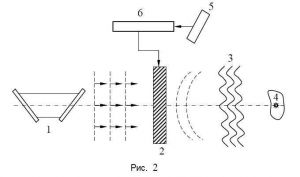
Другим примером системы адаптивной оптики может служить система формирования лазерного пучка, для достижения максимальной плотности потока излучения на некотором объекте. Схема такой системы показана на рис.2.
Корректор 2 преобразует плоский волновой фронт, излучаемый лазером 1, таким образом, чтобы после прохождения всего оптического пути волновой фронт на объекте 4 был плоским, плотность потока излучения была максимальной. Для получения информации об искажении волнового фронта а, следовательно, и для выработки управляющих сигналов, необходимо время двойного прохождения излучения от лазера 1 до объекта 4. Расположение датчика 5 перед корректором не означает теперь размыкания цепи обратной связи, поскольку корректор 2 влияет на характер освещения объекта 4 и, следовательно, на отраженное им световое поле.
Возможно и другое размещение датчика 5, как показано на рис. 3. В этом случае отраженное излучение регистрируется после вторичного прохождения корректора.
Как видно из представленных схем систем адаптивной оптики, данные системы для выполнения своих функции должны содержать три основных компонента:
- устройство воздействия на волновой фронт, которое может быть отражающим или преломляющим
- измерительное устройство, которое принимает свет и вырабатывает сигнал, связанный с оптимизируемым свойством
- устройство обработки информации, воспринимающее результаты измерений и преобразующее их в сигналы для управления устройством воздействия на волновой фронт.
Расположение основных компонентов определяется назначением системы.





